
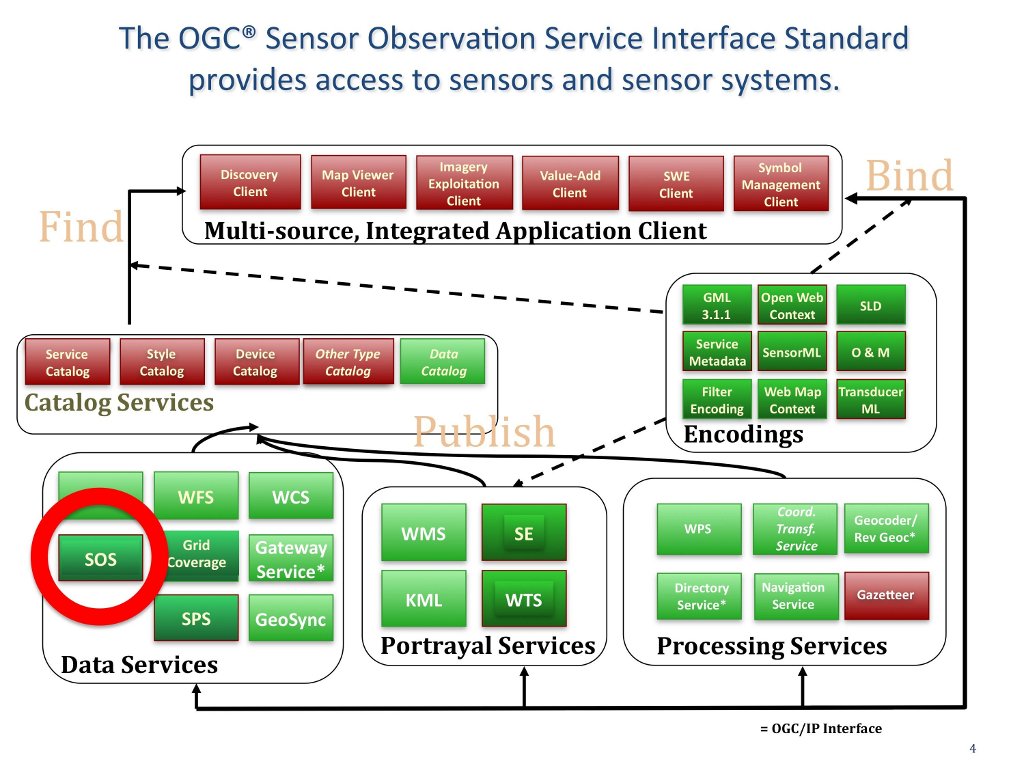
Το πρότυπο Sensor Observation Service (SOS) του OGC αφορά μια διαδικτυακή υπηρεσία δεδομένων. Το πρότυπο SOS του OGC ορίζει μια τυποποιημένη διεπαφή και λειτουργίες για πρόσβαση σε παρατηρήσεις από αισθητήρες και συστήματα αισθητήρων που ομοιογενείς για όλα τα συστήματα αισθητήρων (περιλαμβανομένων τηλεπισκοπικών, επίγειων, ακίνητων και κινητών αισθητήρων). Το πρότυπο SOS παρέχει αποτελέσματα ερωτημάτων στο πρότυπο Observation and Measurements (O&M) για τη μοντελοποίηση παρατηρήσεων από δέκτες αλλά και με τη χρήση της γλώσσας SensorML για τη μοντελοποίηση των συστημάτων αισθητήρων και δεκτών. (http://www.opengeospatial.org/standards/sos)
Το πρότυπο SOS ορίζει ένα κοινό μοντέλο για αισθητήρες αλλά και συστήματα αισθητήρων το οποίο δεν είναι συγκεκριμένο σχετικά με ένα πεδίο εφαρμογών αλλά μπορεί να χρησιμοποιηθεί χωρίς την εκ των προτέρων γνώση του πεδίου εφαρμογής.
Μια παρατήρηση είναι ένα γεγονός του οποίου το αποτέλεσμα είναι μια εκτίμηση της τιμής μιας ιδιότητας στο πεδίο ενδιαφέροντος, και λαμβάνεται με συγκεκριμένη διαδικασία. Οι παρατηρήσεις ορίζονται από
Οι υποχρεωτικές διαδικασίες μιας υπηρεσίας SOS περιλαμβάνουν: * GetObservation - πρόσβαση στις παρατηρήσεις και στα δεδομένα μετρήσεων μέσω χωρο-χρονικών ερωτημάτων που μπορούν να φιλτραριστούν με βάση γεγονότα * GetCapabilities - Τα μεταδεδομένα της υπηρεσίας SOS * DescribeSensor - Πληροφορίες σχετικές με τους αισθητήρες και τους δέκτες, τις λειτουργίες τους και τις πλατφόρμες τους μοντελοποιημένες σε γλώσσα SensorML
Προαιρετικές λειτουργίες μιας τέτοιας υπηρεσίας περιλαμβάνουν τις: GetResult, GetFeatureOfInterest, GetFeatureOfInterestTime, DescribeFeatureofInterest, DescribeObservationType, DescribeResultModel, Register Sensor, και InsertObservation.