
Сервис данных с датчиков (SOS)¶
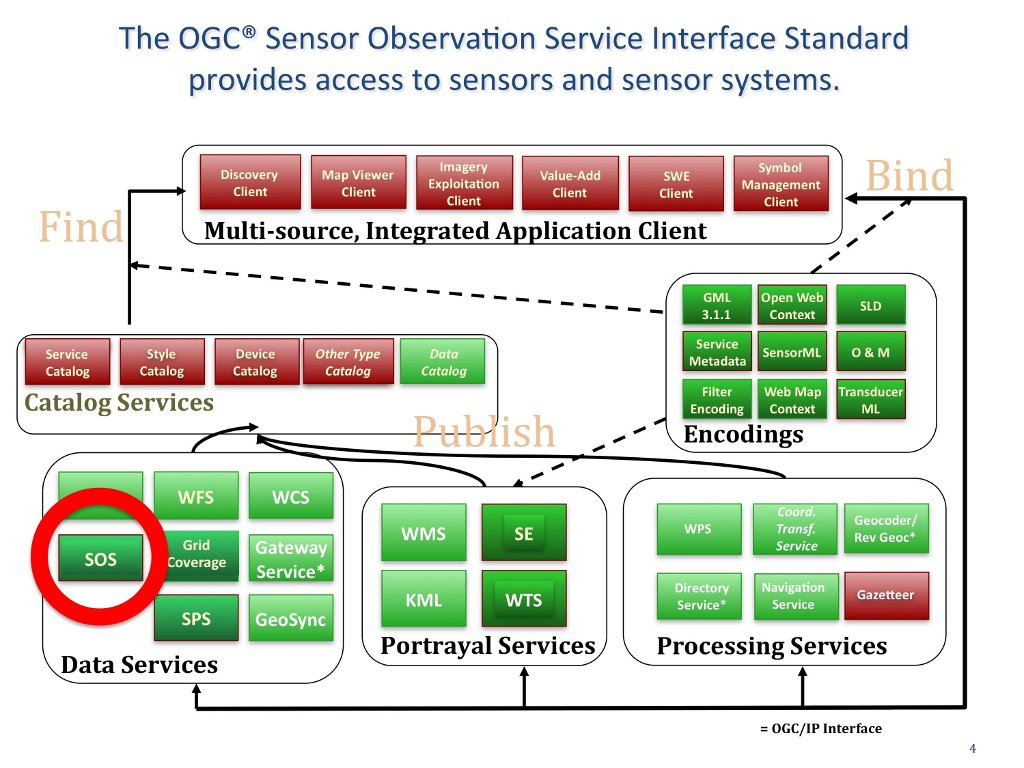
OGC-сервис данных с датчиков (SOS) — это стандарт, описывающий интерфейс к сервису, предоставляющему данные. Стандарт OGC SOS определяет стандартизированные интерфейсы и операции для доступа к результатам наблюдений с датчиков, что соответствует всем системам датчиков, включая удалённые, локальные, фиксированные и мобильные датчики. SOS предоставляет результаты запросов в стандартном формате наблюдений и измерений (O&M) для создания систем наблюдения и в соответствии со спецификацией SensorML для создания датчиков и систем датчиков. (http://www.opengeospatial.org/standards/sos)
Стандарт SOS определяет общую модель для датчиков и систем датчиков, которые не являются предметно-ориентированными и могут быть использованы без априорного знания предметно-ориентированных схем приложений.
Наблюдение — это событие, результат которого определяется значением свойства некоторой области интереса, полученного при помощи определённых процедур. Наблюдения определяются:
- eventTime — когда было получено измерение;
- featureOfInterest — что было измерено;
- observedProperty — какая характеристика была измерена;
- procedure — каким образом было проведено измерение.
Обязательные операции SOS включают в себя: * GetObservation — доступ к результатам наблюдений и измерений при помощи пространственно-временных запросов, которые могут быть отфильтрованы по явлению; * GetCapabilities — метаданные сервиса SOS; * DescribeSensor — информация о датчиках, процессах и платформах в SensorML.
Дополнительные операции включают: GetResult, GetFeatureOfInterest, GetFeatureOfInterestTime, DescribeFeatureofInterest, DescribeObservationType, DescribeResultModel, Register Sensor и InsertObservation.
Также по теме¶
- WCS (Web Coverage Service)
- WFS (Web Feature Service)
- Grid Coverage Service (сервис покрытий)
- Sensor Planning Service (сервис планирования съёмки)
- Coordinate Transformation Service (сервис трансформирования координат)