
Το OpenCPN είναι ελεύθερο λογισμικό για την πλοήγηση πλοίων και σκαφών όλων των τύπων και των μεγεθών. Παρέχει επίσης και σχεδιασμό διαδρομής. Αναπτύσσεται από μια ομάδα ενεργών ναυτικών που δοκιμάζουν και βελτιστοποιούν την εφαρμογή σε πραγματικές συνθήκες.
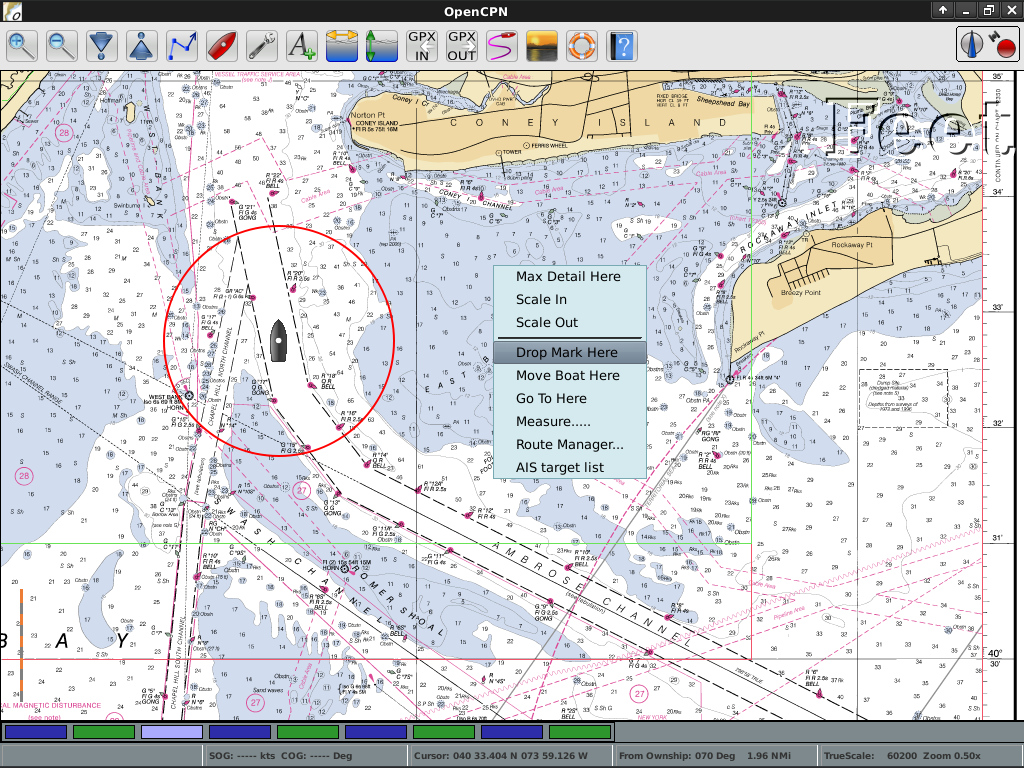
Το OpenCPN παρουσιάζει στο χρήστη την παρούσα θέση του σκάφους, όπως επίσης την ταχύτητα και την πορεία, προβαλλόμενη πάνω σε ακριβή χάρτη πλοήγησης, χάρτες παλιρροιών και προβλέψεών τους. Οι πληροφορίες που συλλέγονται από ραδιοσυνδέσεις και περιγράφουν τη θέση άλλων σκαφών μπορούν να απεικονιστούν.
Καθώς το σκάφος κινείται, νέοι χάρτες επιλέγονται και παρουσιάζονται στο χρήστη με την επιθυμούμενη ανάλυση και λεπτομέρεια. Επιπλέον, ο χρήσης μπορεί να εισάγει διαδρομές και σημεία προορισμού επιτρέποντας έτσι την διεπαφή με εξωτερικό αυτόματο πιλότο για την διατήρηση σταθερής πορείας.
Το OpenCPN υποστηρίζει:
Κεντρική Ιστοσελίδα: http://www.opencpn.org
Άδεια: GNU General Public License (GPL) version 2
Έκδοση Λογισμικού: 2.5.0
Υποστηριζόμενες πλατφόρμες: GNU/Linux, Mac OSX, MS Windows
Υποστήριξη: http://www.cruisersforum.com/forums/f134